离线图优化技术#
上一章节主要回顾了计算图优化的各个组成部分,包括基础优化、扩展优化以及布局和内存优化。这些优化方式在预优化阶段、优化阶段和后优化阶段都有所应用,以提高计算效率。同时,还介绍了 AI 框架和推理引擎在图优化方面的不同应用和侧重点。接下来,我们从计算图优化的各个组成部分开始逐步进行讲解。
基础图优化方案#
基础图优化指涵盖了所有保留语义的修改,如常量折叠、冗余节点消除和有限数量的节点融合,具体如下所示:
Constant folding 常量折叠:主要针对那些在模型推理中值不变的常量进行处理。如果某个操作的所有输入都是常量,那么它的输出也会是一个常量,这个操作可以在编译阶段就执行,并将结果存储为一个常量,从而在实际处理中减少计算量。
Redundant eliminations 冗余节点消除:如果模型中存在一些冗余的节点,例如同样的计算被多次执行,那么可以消除这些冗余的节点,不仅可以减少内存消耗,还可以提升运算效率。
Operation fusion 算子融合:算子融合就是把几个连续的算子合并成一个算子,这种方式可以减少数据的读写操作,提升运算速度。
Operation Replace 算子替换:如果可以找到一个等效但更高效的算子来完成相同的计算任务,就可以将原算子替换为这个更高效的算子。例如,将高精度的计算替换为低精度计算。
Operation Forward 算子前移:如果有些算子的输入无关于程序的其它部分,那么这个算子可以前移执行,这样可以减少运行时的计算负担。
常量折叠#
常量折叠(Constant folding)是编译器优化技术之一,通过对编译时常量或常量表达式进行计算来简化代码。常量折叠是将计算图中可以预先可以确定输出值的节点替换成常量,并对计算图进行一些结构简化的操作。
推理引擎中使用的常量折叠如上所述,通常试图在编译时计算出常量表达式的结果,从而消除在运行时对这些表达式的计算。这种优化可以显著提高程序的运行效率。假设有一个推理引擎正在处理一个计算图,其中包含如下的操作:
x = 5
y = 10
z = x * y
在这个例子中,x 和 y 都是常量,因此他们的乘积 z 也是可以在编译时计算出来的常量。常量折叠优化就是将这个计算在编译时进行,从而消除了在运行时进行这个计算的需要。经过优化,上述代码将被转化为:
z = 50
这样,程序在运行时就不再需要进行乘法运算,因为 z 的值已经在编译时被计算出来了。
具体方法如下所示:
Constant folding:Const 折叠,常量折叠如果一个 Op 所有输入都是常量 Const,可以先计算好结果 Const 代替该 Op,而不用每次都在推理阶段都计算一遍
Fold Const To ExpandDims:ExpandDims 折叠,ExpandDims Op 指定维度的输入是常量 Const,则把这个维度以参数的形式折叠到 ExpandDims 算子中
Fuse Const To Binary:Binary 折叠,Binary Op 第二个输入是标量 Const,把这个标量以参数形式折叠到 Binary Op 的属性中
Const 折叠#
Constant folding 常量折叠:如果一个 Op 所有输入都是常量 Const,可以先计算好结果 Const 代替该 Op,而不用每次都在推理阶段都计算一遍。
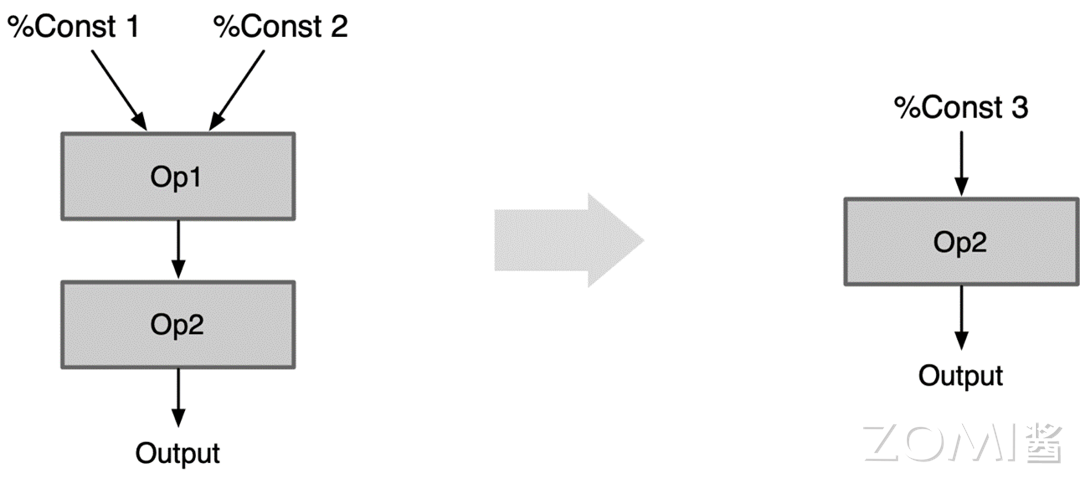
如图所示,我们有两个常量输入,通过两个操作 Op1 和 Op2 进行处理。具体来说,Op1 接收两个常量作为输入,Opened 接收 Op1 的输出作为输入。在离线计算中,我们实际上可以预先计算出这两个常量的结果,然后把这个结果作为一个新的常量输入给 Op2。这种预先计算并替换常量的策略即为常量折叠。
ExpandDims 折叠#
ExpandDims Op 指定维度的输入是常量 Const,则把这个维度以参数的形式折叠到 ExpandDims 算子中。
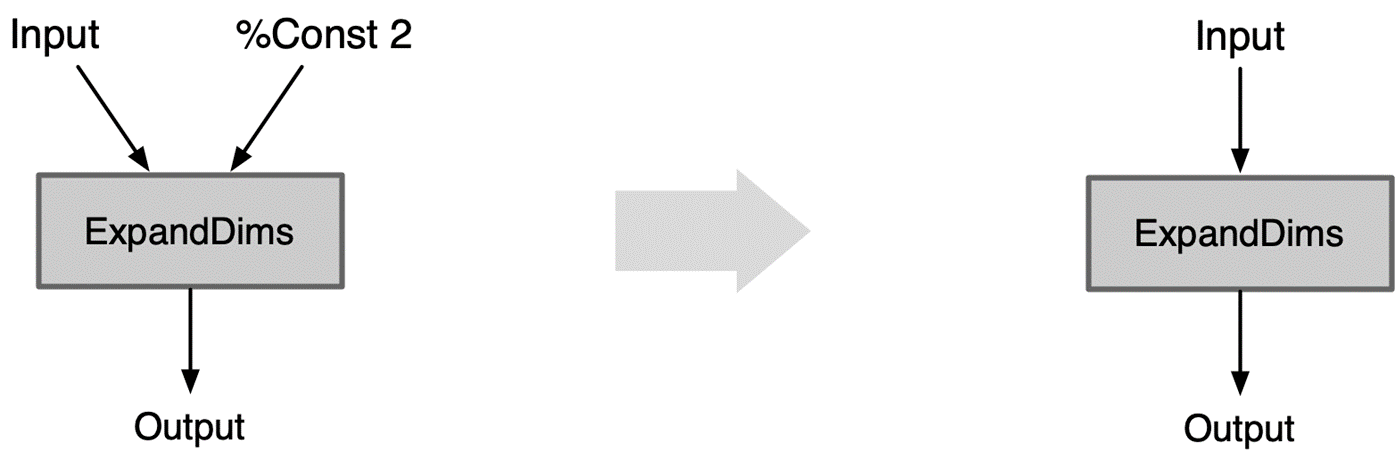
在处理计算图优化的过程中,当 ExpandDims 操作的指定维度输入是常量时,我们可以直接将其堆叠进参数,并放在 ExpandDims 这个操作符内部。这样一来,我们就减少了一个操作符的使用。因为常量可能是一个操作符,或者可能占用一块内存空间。
Binary 折叠#
Binary Op 第二个输入是标量 Const ,把这个标量以参数的形式折叠到 Binary Op 的属性中。
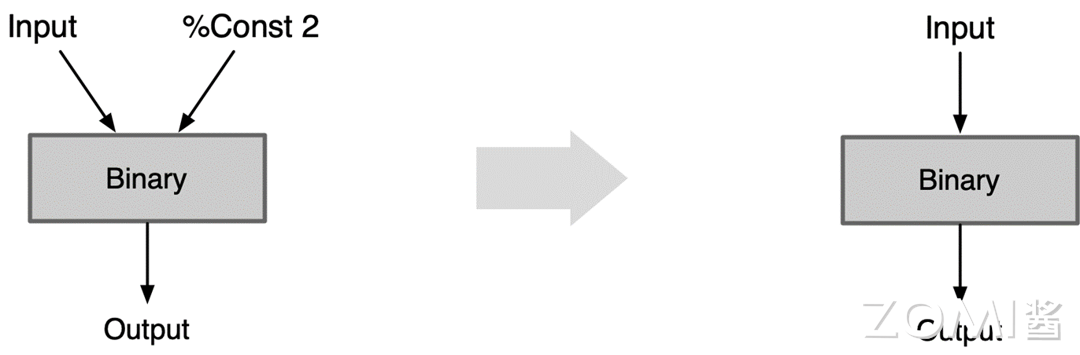
Binary 折叠其原理与 ExpandDims 的折叠类似。在 Binary 折叠中,如果输入是标量,那么我们可以直接将标量作为 Binary 操作的一个参数,然后进行计算。这样做的结果是,我们减少了一个计算节点。对于计算过程来说,提高了计算效率,节省了计算资源。
冗余节点消除#
冗余节点消除是在不改变图形结构的情况下删除所有冗余节点,其主要分为以下几种形态。
Op 本身无意义#
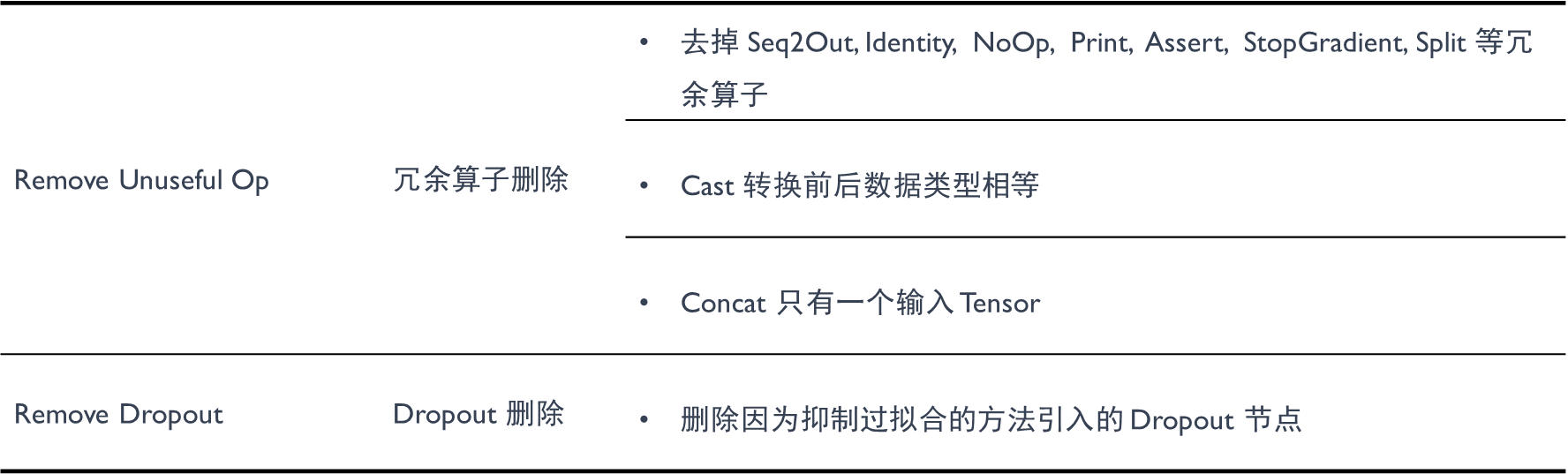
有些 Op 本身不参与计算,在推理阶段可以直接去掉对结果没有影响。如下图所示,在转换前后类型相同的 cast,只有一个输入 tensor 的 concat,以及 Seq2Out、Identity、NoOp、Print、Assert、StopGradient、Split 等算子均可以通过一系列的模板删除包括 dropout 算子。
具体示例如下图所示:
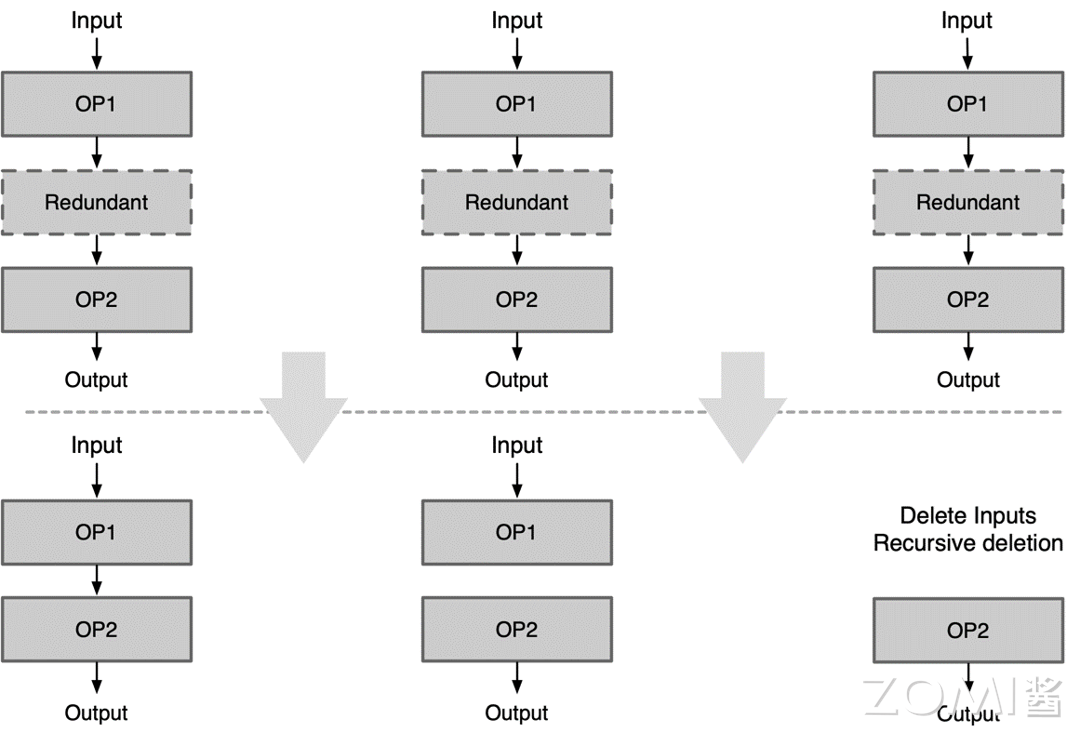
当图中存在冗余算子时,可能会出现以下三种情况:
当前冗余算子的输出对于下一个节点是有意义的:可以直接去除冗余算子,然后将上一个算子的输出和下一个算子的输入相连
当前冗余算子的输出对于下一个节点是无意义的:此时可以把它切成两个子图,一个子图就是 input->op1,另一个子图则是 op2->output
当前冗余算子的输入对于下一个节点是无意义的:只要这个节点的输入没有意义,轮循删除往上的节点,直到输入有意义为止。
Op 参数无意义#
有些 Op 本身是有意义,但是设置成某些参数后就变成了无意义了的 Op。典型示例如 cast 算子,其主要是对数据的排布进行转换,当输入的参数等于输出的参数的时候,算子本身则无意义且可删除。还有很多种其他情况下的算子,在删除处理后,实践证明对于模型性能的提升具有极大的帮助。如下图所示:

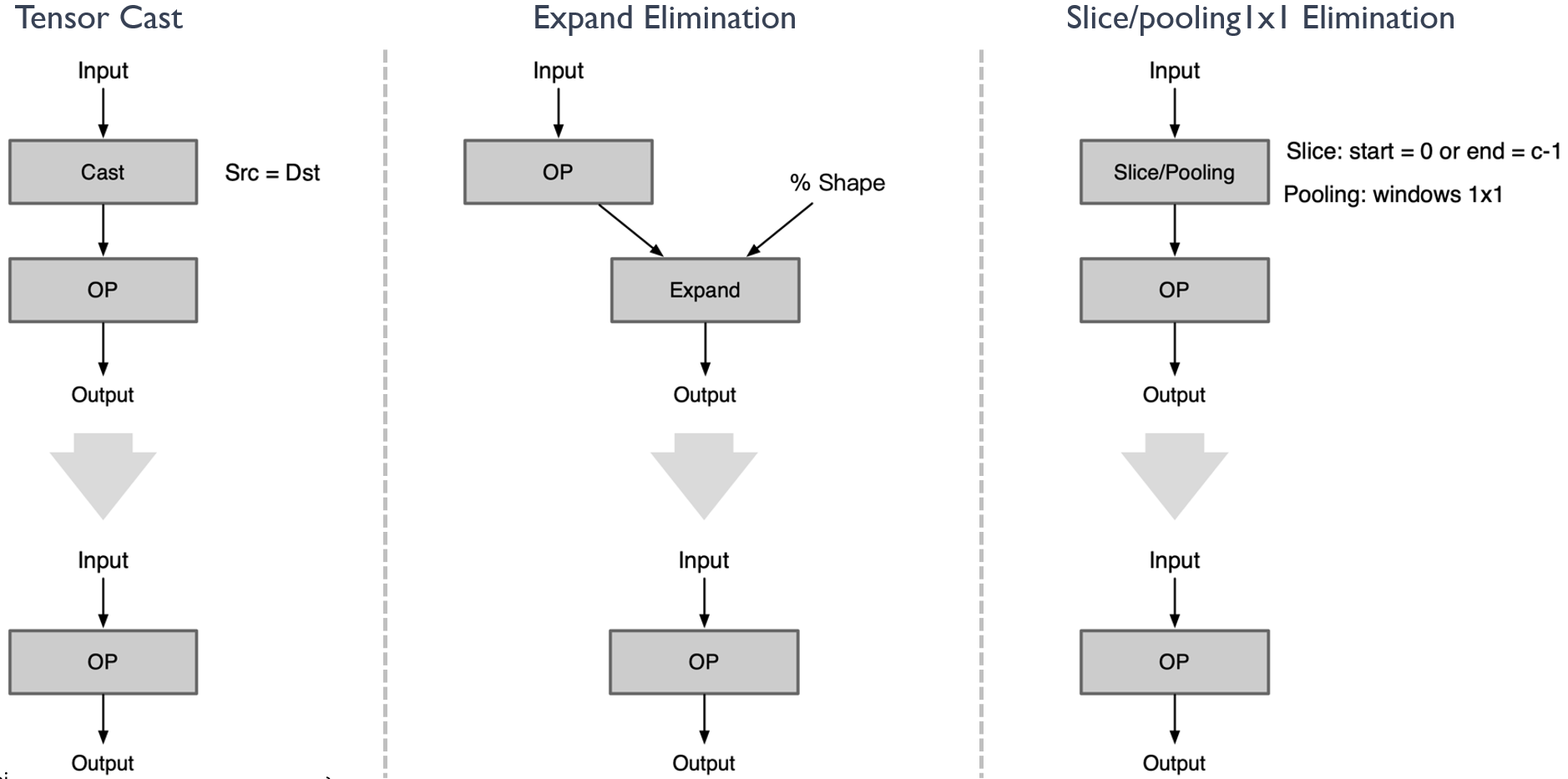
详细示例如下所示:
对于 cast 算子,当它的 source 等于 destination 的时候,cast 算子可以删除
对于 ExpandDims 算子,当输出的 shape 跟输入的 shape 是一致时,ExpandDims 算子可以删除
对于 slice/pooling 算子,index_start 等于 0 或者 index_end 等于 channel-1 以及 pooling 算子的窗口为 1x1 的时候,算子均可删除
Op 位置无意义#
一些 Op 在计算图中特殊位置会变得多余无意义。
详细示例如下所示:
示例中的 cast 算子,unsqueeze 算子以及无后续输出的 op1 和在 global pooling 之后的 reshape/flatten 算子等,均可以进行冗余算子的消除。
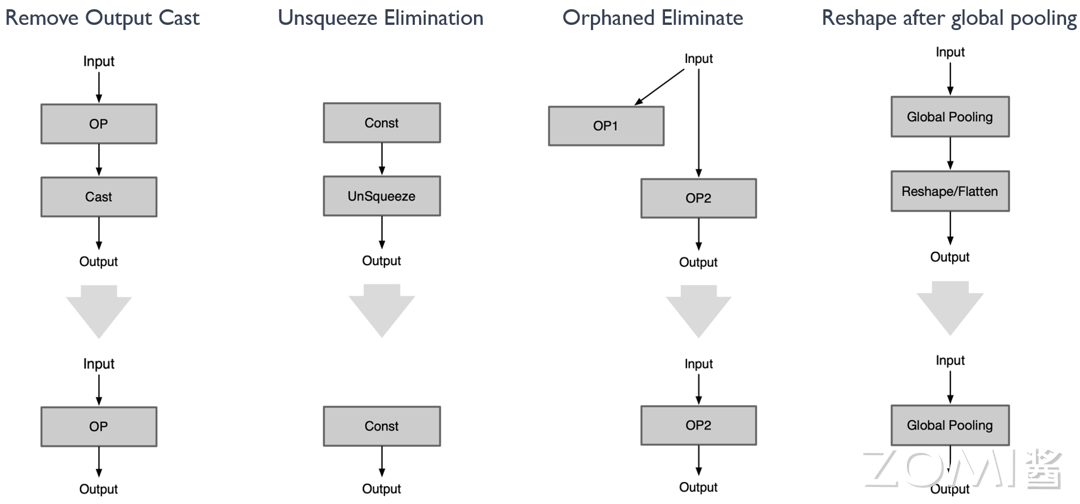
图一:在优化计算图的过程中,有些算子的存在并没有实际意义。例如,Cast 算子,如果它没有作用,我们就可以直接将其删除。
图二:与 Cast 算子类似,UnSqueeze 算子如果在计算图中没有起到实质作用,那么我们也可以选择将其删除,以简化计算图的结构。
图三:部分情况下,输入数据给到了某个算子 OP1,但是 OP1 的输出并没有被其他的算子接收,这就意味着 OP1 的计算结果没有被利用起来。在这种情况下,我们可以选择删除这个分支,因为其存在并没有实际意义。
图四:在处理 Global pooling 算子的过程中,我们发现它后面接的一些 Reshape 或者 Flatten 算子其实是没有意义的。因为这些算子的存在并不会改变 Global pooling 的输出结果。所以,我们可以选择将这些算子删除,以优化计算图的结构。
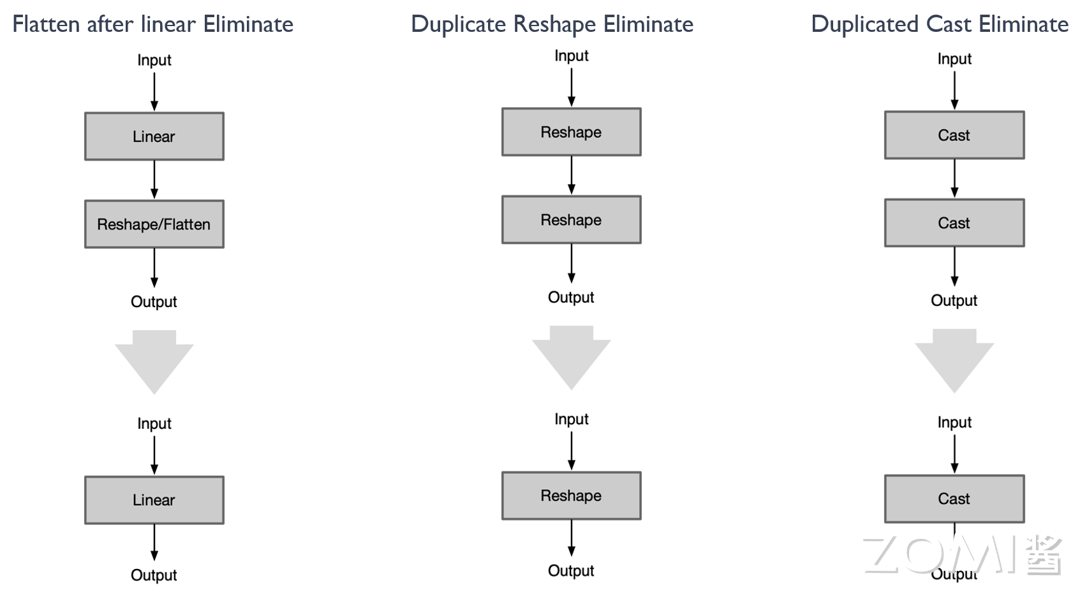
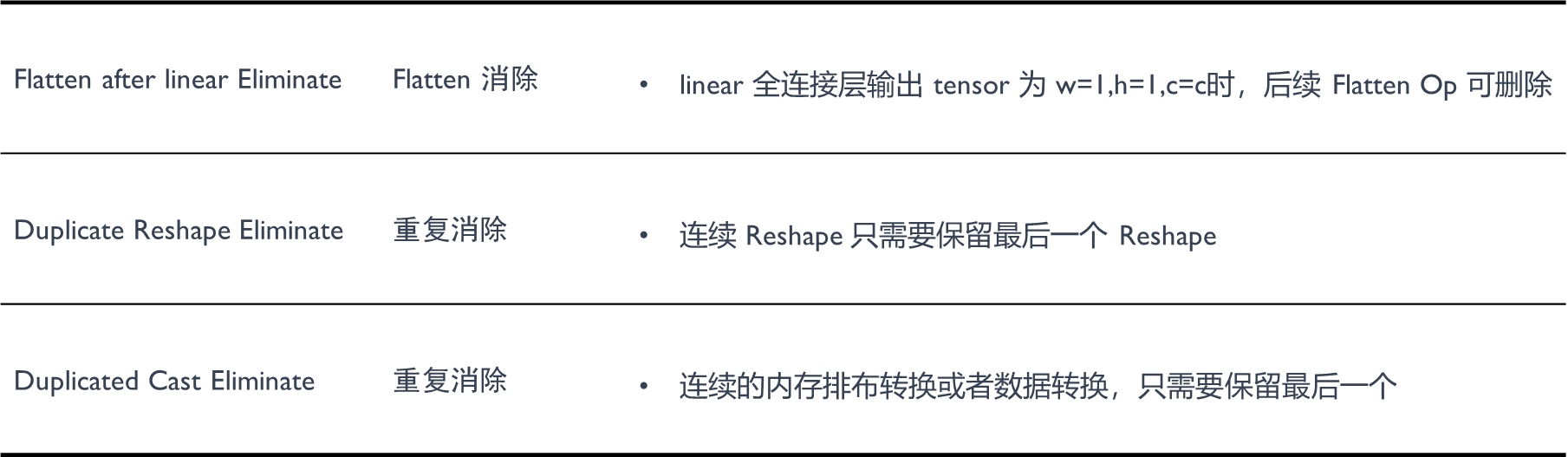
图一:与上图中的图四相似,我们发现 Linear 前面接的一些 Reshape 或者 Flatten 算子其实是没有意义的。因为这些算子的存在并不会改变 Linear 的输出结果。所以,我们可以选择将这些算子删除,以优化计算图的结构。
图二描述:图示展示了两个相反的 Reshape 算子。在这种情况下,这两个 Reshape 算子相互抵消,即它们的存在并不会改变数据的形状。因此,为了简化计算图和减小计算复杂性,我们可以选择删除这两个算子。
图三描述:图示展示了两个相反的 Cast 算子,一个将数据从 A 类型转换到 B 类型,另一个则将数据从 B 类型转换回 A 类型。这两个算子的存在同样没有实际意义,因为它们的操作结果并不会改变数据的类型。因此,我们同样可以选择删除这两个算子。
Op 前后反义#
前后两个相邻 Op 进行操作时,语义相反的两个 Op 都可以删除。
Squeeze ExpandDims Eliminate: Squeeze 和 ExpandDims 这两个 Op 是反义的,一个压缩维度,一个是拓展维度,当连续的这两个 Op 指定的 axis 相等时即可同时删除这两个 Op。
Inverse Cast Eliminate: 当连续的两个内存排布转换 Op 的参数前后反义,即 src1 等于 dst2,可同时删除这两个 Op。
Quant Dequant Eliminate: 连续进行量化和反量化,可同时删除这两个 Op。
Concat Slice Elimination: 合并后又进行同样的拆分,可同时删除这两个 Op。
详细示例如下所示:可参考上述规则,对于存在前后反义算子的情况,进行冗余节点的消除。
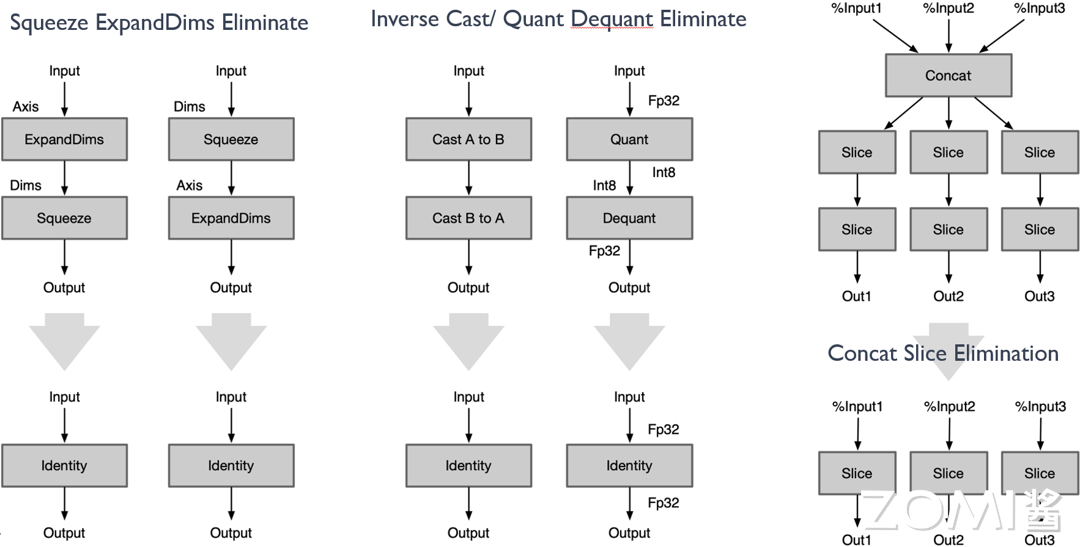
图一:描绘了 Squeeze 算子与 ExpandDims 算子在计算图优化过程中的作用。这两个算子进行的是逆向操作,先对矩阵进行扩张(ExpandDims),后合并相同维度(Squeeze),这就形成了一个等效于无操作的过程。因此,省略这两个步骤可以优化计算流程,加速推理过程。
图二:Cast 算子将 A 变换为 B,再将 B 变换为 A 等同于无操作,同样的 Quant 算子和 Dequant 算子如果作用于同一个变量,我们均可以选择将其删除,以简化计算图的结构。
图三:在如图所示的 "Concat" 和 "Slice" 的例子中,用单个 "Slice" 操作替换 "Concat" 和 "Slice" 组合的优化案例。通过将 "Concat" 操作和后续的 "Slice" 操作整合为直接的 "Slice" 操作,可以抽象化计算过程并提高计算效率。
公共子图优化#
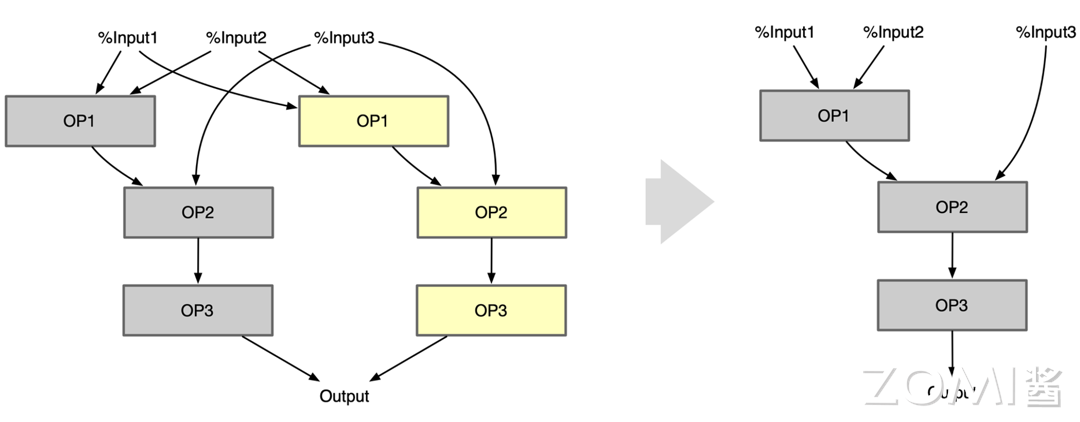
在一个神经网络中,如果几个子图的类型、参数和输入均相同, 则将他们称做公共子图。对于公共子图, 只需要计算其中一个子图的值, 其他子图的值可以通过赋值得到。这个过程就称作公共子图消除, 它是一种传统编译器中常用的优化手段, 经过迁移也可以应用到深度学习编译器中。
Common Subexpression Elimination:当模型当中出现了公共子图,如一个输出是另外两个同类型同参数的 Op 的输入,则可进行删除其中一个 Op。
基本思路是通过一个 MAP 表, 记录截止当前, 已处理过的同一种类型的 OP。对于当前正在处理的 OP, 先查找该 MAP 表, 如果能找到其他和正在处理的 OP 类型相同的 OP, 则对他们进行遍历, 如果其中某个 OP 的输入和参数与当前正在处理的 OP 相同, 则它们为公共子表达式, 结果可以互相替代;如果所有 OP 都不能与当前正在处理的 OP 匹配, 则将当前 OP 复制一份返回。
算子融合#
算子融合(Operator Fusion)是深度学习中一种常见的优化技术,主要用于减少 GPU 内存访问,从而提高模型的执行效率。在神经网络模型中,一个模型通常由多个算子(例如卷积、激活函数、池化等)组成,这些算子的计算过程中会涉及到大量的数据的读取和写入。如果能将多个算子融合为一个复合算子,就可以减少内存访问次数,从而提高模型的运行效率。
例如,假设我们有一个计算过程:y = ReLU(Conv(x)),如果我们将这个计算过程拆分为两步:temp = Conv(x),y = ReLU(temp),那么我们需要先将Conv(x)的结果写入内存,然后再从内存中读取这个结果用于 ReLU 的计算。但如果我们将这两个算子融合为一个算子,那么就可以直接将Conv(x)的结果输入到 ReLU,无需额外的内存访问,从而提高运行效率。
算子融合不仅可以减少内存访问次数,还可以提高计算密度,使得 GPU 等硬件能更充分地利用其计算资源。但是,算子融合也需要考虑到算子的计算顺序和计算精度,不能随意地将算子进行融合。下面将围绕相邻 Op 中,存在数学上线性可融合的关系进行主要的介绍:
示例一#
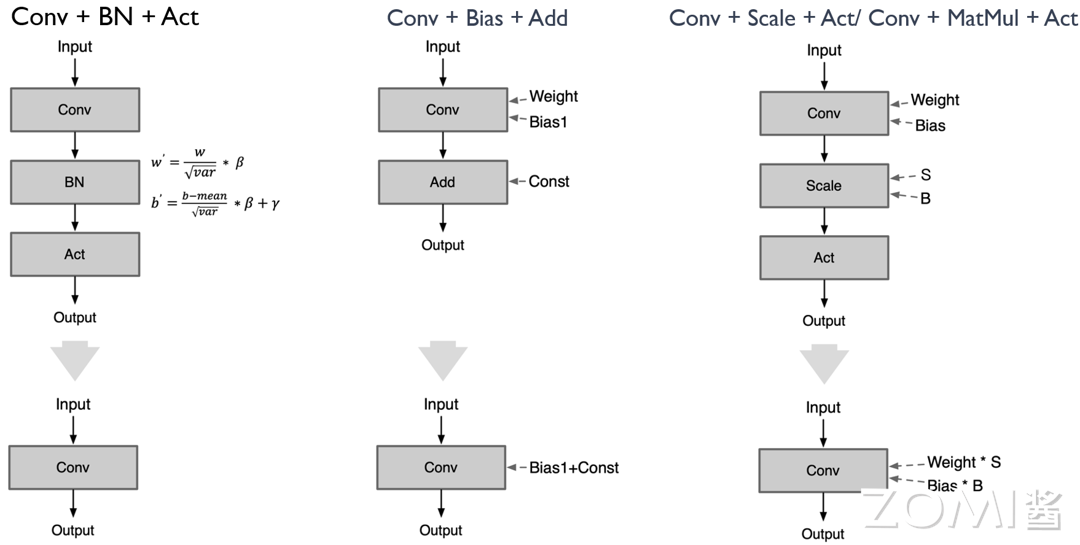
Conv + BN + Act:Conv Op 后跟着的 Batch Normal 的算子可以把 BN 的参数融合到 Conv 里面
主要是基于以下数学原理:
卷积操作(Conv):这是一种线性操作,可以表示为 y=W*x+b,其中 W 代表权重,x 代表输入,b 代表偏置。
批量归一化操作(Batch Normalization,BN):BN 的基本形式为 \(y=(x-mean(x))/sqrt(var(x)+eps)*gamma+beta\),其中 \(mean(x)\) 和 \(var(x)\) 分别是 x 的均值和方差,gamma 和 beta 是学习的尺度和偏移参数。
将 Conv 和 BN 进行融合,然后按照 \(y=W'*x+b'\) 的形式重新构造,就是将 BN 的参数 gamma 和 beta 融合到 Conv 的权重 W 和偏置 b 中,得到新的权重 \(W'\) 和偏置 \(b'\)。具体计算方式为:
这样,我们就可以将 BN 融合到 Conv 中,得到的新的权重 \(W'\) 和偏置 \(b'\) 可以直接用于 Conv 操作,从而减少了 BN 的计算。以下是一个简单的 Python 代码示例:
def fuse_conv_bn(conv, bn):
# 计算新的权重和偏置
w = conv.weight
mean = bn.running_mean
var_sqrt = torch.sqrt(bn.running_var + bn.eps)
beta = bn.weight
gamma = bn.bias
w_prime = gamma / var_sqrt * w
b_prime = beta - gamma / var_sqrt * mean
# 更新 Conv 的权重和偏置
conv.weight.data = w_prime
conv.bias.data = b_prime
return conv
Conv + Bias + Add:Conv Op 后跟着的 Add 可以融合到 Conv 里的 Bias 参数里面
在"Conv + Bias + Add"的操作中,假设卷积输出为 X,偏置值为 b,Add 操作的值为 a。那么,这个操作序列的输出结果为:\(Output = X + b + a\)。注意到,加法操作满足交换律和结合律,所以我们可以将偏置值 b 和 Add 操作的值 a 进行相加,得到一个新的偏置值 \(b' = b + a\)。那么,原本的操作序列就可以简化为 "Conv + Bias",其中 Bias 的值为 b'。
Conv + Scale + Act:Conv Op 后跟着的 Scale 可以融合到 Conv 里的 Weight 里面
主要是基于以下的数学原理:
尺度变换操作(Scale):这是一种乘法操作,可以表示为 \(y=x*alpha\),其中 alpha 是需要学习的尺度参数。
参考 Conv + BN + Act 的融合方式,将 Conv 和 Scale 进行融合,就是将 Scale 的参数 alpha 融合到 Conv 的权重 W 和偏置 b 中,得到新的权重 \(W'\) 和偏置 \(b'\)。具体计算方式为:
这样,我们就可以将 Scale 融合到 Conv 中,得到的新的权重 \(W'\) 和偏置 \(b'\) 可以直接用于 Conv 操作,从而减少了 Scale 的计算。
Conv + MatMul + Act:Conv Op 后跟着的 MatMul 可以融合到 Conv 里的 Weight 里面,原理与上述 scale 的融合相同。
示例二#
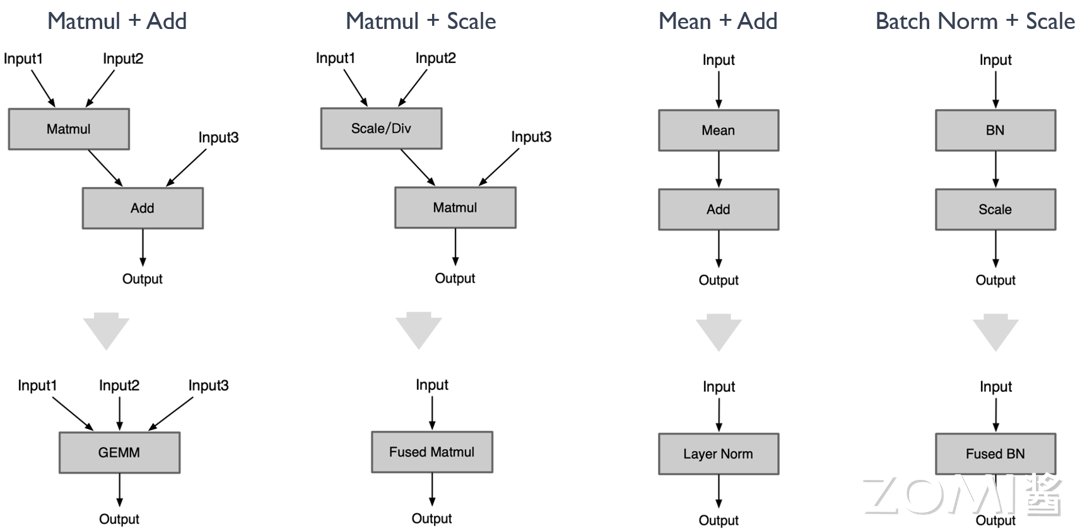
Matmul + Add:使用 GEMM 代替矩阵乘 Matmul + Add;
Matmul + Add/Scale:Matmul 前或者后接 Add / Scale / Div 可以融合到 Matmul 中;
因此可以一直往后融合下去。这个融合在性能上肯定是提升的,但是在精度上有可能会产生牺牲,特别是融合了 mul 算子。因为原来的矩阵乘 weight 和 bias 以及 scale 通常都是比较小的小于 1 的数值,把 scale 融合到 weight 和 bias 里面后,会导致 weight 和 bias 数值进一步降低,可能导致精度下降。
Mean + Add:使用 Mean 后面跟着 Add,使用 Layer Norm 代替;
Batch Norm + Scale:scale 的 \(s\) 和 \(b\) 可以直接融合到 BN Op 里;
在 BN 操作后通常会有一个 Scale 操作,用于恢复数据的原始分布。具体来说,如果 \(x\) 是 BN 的输出,那么 Scale 操作就是 \(y = s * x + b\),其中 \(s\) 和 \(b\) 是可学习的参数。
将两个操作融合到一起,即直接在 BN 操作中包含 Scale 操作。这样做的优点是可以减少计算量和内存消耗,因为不需要单独存储 BN 的输出。同时,由于 BN 和 Scale 是连续的线性操作,它们的融合不会改变模型的表示能力。
Matmul + Batch Norm:与 Conv + BN 相类似
Conv + ReLU、Conv + ReLU6、Conv + Act
Act 激活操作和 Conv 操作虽然是连续但是计算过程是独立的,在推理的时候是先计算 Conv 层:访问 Conv 输出位置,再计算 ReLU 层(即第二次访存)。因此造成了访问两遍输出 output,增加了访存时间降低了推理效率。
如果计算出 Conv 结果后立马进行 Act 激活计算,把最终结果输出,则只需要访存一次。计算量不变,减少访存次数,也能提高推理速度。
算子替换#
算子替换(Operator Substitution)是一种神经网络模型优化技术,主要用于改善模型的计算效率和性能。这种技术是将模型中的某些算子替换为功能相同或相似,但计算效率更高或对特定硬件优化更好的算子。例如:
在某些情况下,两个连续的卷积层可以被替换为一个等效的卷积层,以减少计算量。
使用深度可分离的卷积(depthwise separable convolution)替换标准卷积,可以显著减少计算量,但仍能保持相似的性能。
算子替换需要保证替换后的模型在功能上与原模型尽可能接近,以保证模型的性能不会因为算子的替换而有所下降。算子替换的原理是通过合并同类项、提取公因式等数学方法,将算子的计算公式加以简化,并将简化后的计算公式映射到某类算子上。算子替换可以达到降低计算量、降低模型大小的效果。在实际应用中,算子替换通常与其他优化技术如算子融合等结合使用,以达到最佳的优化效果。
一换一替换#
将某 Op 以另外 Op 代替,能减少推理引擎需要单独实现及支持的 OP。
具体示例:
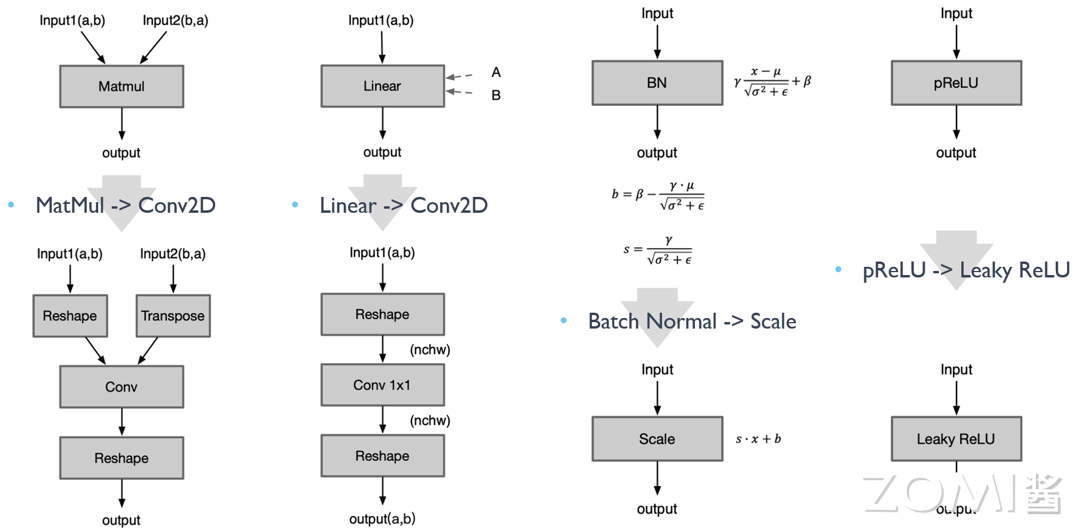
MatMul -> Conv2D:将矩阵乘变成 Conv,因为一般框架对 Conv 是做了更多的优化
Linear -> Conv2D:将全连接层转变成 1x1 Conv,因为对 Conv 做了更多的优化
Batch Normal -> Scale:BN 是等价于 Scale Op 的,转换成 Scale 计算量更少,速度更快
pReLU -> Leaky ReLU:将 pReLU 转变成 Leaky ReLU,不影响性能和精度的前提下,聚焦有限算法
Conv -> Linear After global pooling:在 Global Pooling 之后 Conv 算子转换成为全连接层
一换多替换#
将某 Op 以其他 Op 组合形式代替,能减少推理引擎需要单独实现及支持 Op 数量
具体示例:
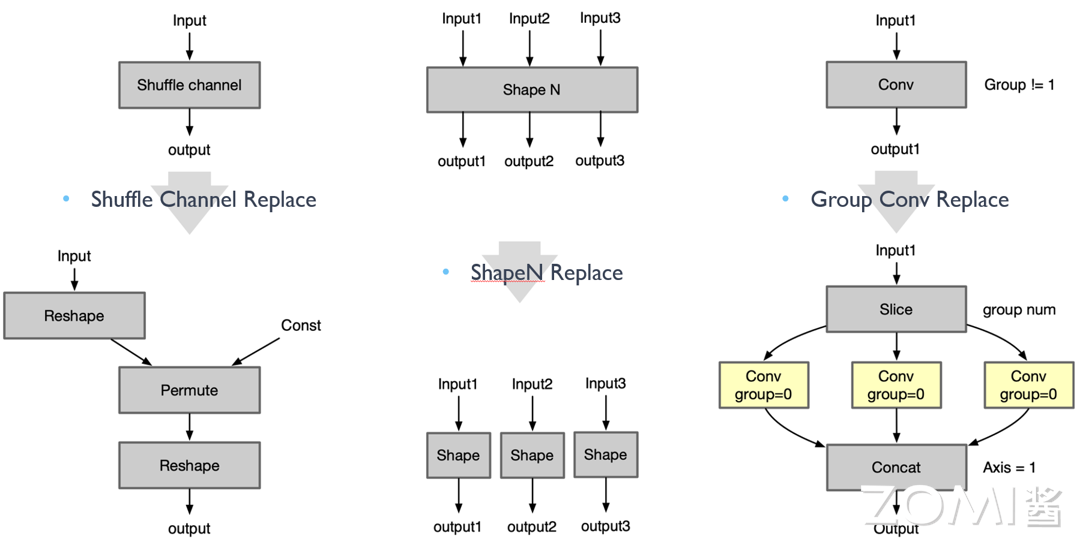
Shuffle Channel Replace:Shuffle Channel Op 大部分框架缺乏单独实现,可以通过组合 Reshape + Permute 实现:
import torch
import torch.nn.functional as F
def shuffle_channel(x, groups):
batchsize, num_channels, height, width = x.data.size()
channels_per_group = num_channels // groups
# reshape
x = x.view(batchsize, groups, channels_per_group, height, width)
# permute
x = x.permute(0, 2, 1, 3, 4).contiguous()
# flatten back
x = x.view(batchsize, -1, height, width)
return x
Pad Replace:将老版 onnx 的 pad-2 的 pads 从参数形式转成输入形式:
import torch.nn.functional as F
def pad_replace(x, pads):
return F.pad(x, pads)
ShapeN Replace:将 ShapeN Op 通过组合多个 Shape 的方式实现:
def shape_n_replace(*xs):
return [x.shape for x in xs]
Group Conv Replace:把 Group 卷积通过组合 Slice、Conv 实现:
import torch
import torch.nn.functional as F
def group_conv_replace(x, weight, bias, stride, padding, dilation, groups):
# slice input
xs = torch.chunk(x, groups, dim=1)
# apply conv for each slice
ys = [F.conv2d(xi, wi, bi, stride, padding, dilation, 1) for xi, wi, bi in zip(xs, weight, bias)]
# concat back
y = torch.cat(ys, dim=1)
return y
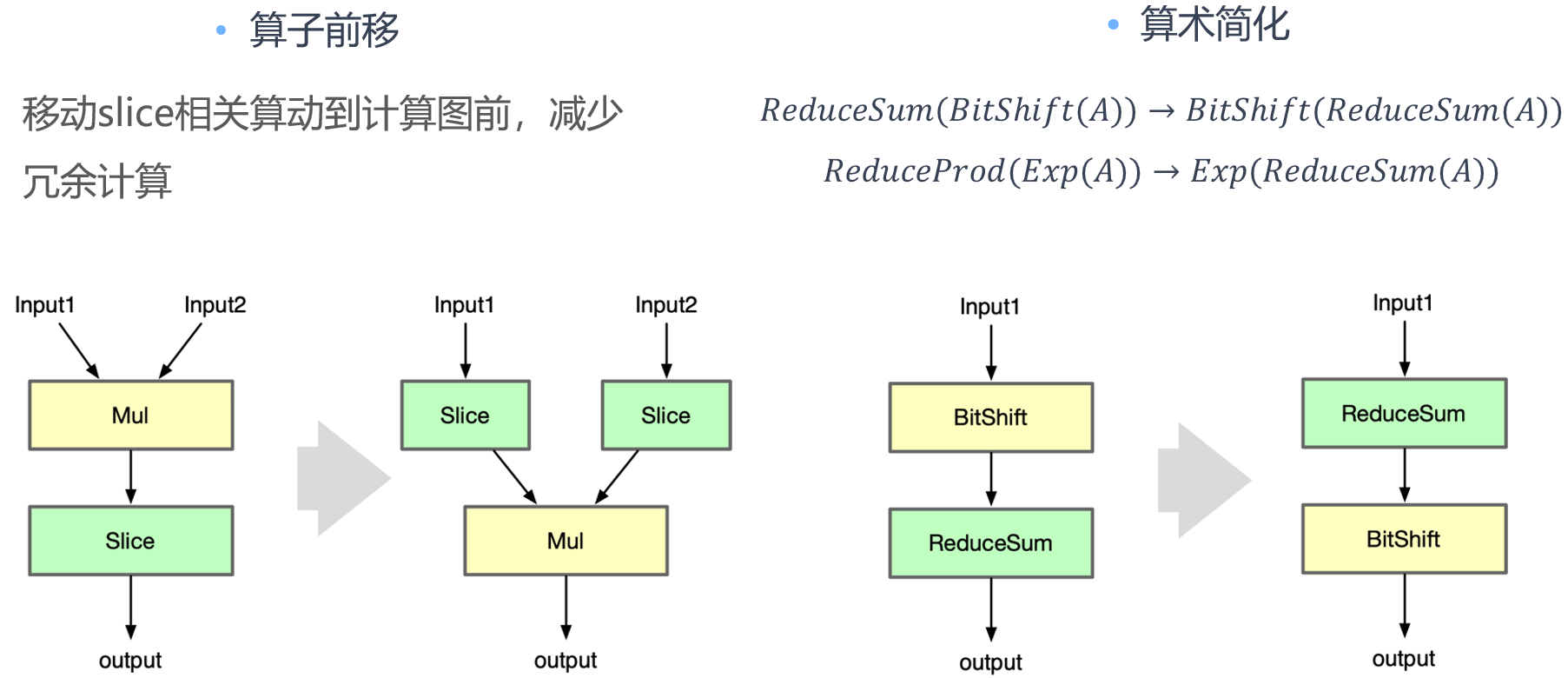
算子前移#
在神经网络模型优化中,算子前移通常指的是将某些计算过程提前进行,以减少重复计算并提高模型的运行效率。
例如,假设我们有一个神经网络模型,其中有一部分计算是固定的,即无论输入是什么,这部分计算的结果都不会改变。在这种情况下,我们就可以将这部分计算提前进行,并将结果保存下来。然后在实际的计算过程中,我们只需要使用保存的结果,而无需再次进行这部分计算。这样就可以大大减少计算量,提高模型的运行效率。
算子前移是一种常见的神经网络模型优化技术,它可以有效地减少计算量,提高模型的运行效率。然而,算子前移也需要考虑到模型的计算顺序和数据依赖性,不能随意地将计算过程提前。
具体示例:
Slice and Mul:Shuffle Channel Op 大部分框架缺乏单独实现,可以通过组合 Reshape + Permute 实现。
Bit shift and Reduce Sum:利用算术简化中的交换律,对计算的算子进行交换减少数据的传输和访存次数。
小结与思考#
本节节内容主要讨论了计算图优化中的常量折叠和冗余节点消除。详细解读了如何借助这两种方法,优化复杂的计算图,提高计算效率和减少不必要的计算任务。
深入探讨了 cast、ExpandDims、Squeeze 和 Slice 等算子在神经网络中的搭配和使用,以及它们在不同组合情况下的优化可能性。这有助于在神经网络设计和计算过程中,减少重复计算和冗余计算,提高整体性能。