Auto-Tuning 原理#
在硬件平台驱动算子运行需要使用各种优化方式来提高性能,然而传统的手工编写算子库面临各种窘境,衍生出了自动生成高性能算子的的方式,称为自动调优。在本节我们首先分析传统算子库面临的挑战,之后介绍基于 TVM 的业界领先的三个自动调优系统。
高性能算子挑战#
DNN 部署的硬件平台越来越多样化,包括 CPU、GPU、FPGA 和 ASIC,这些硬件平台内部又具有不同的资源。为了在这些平台上部署 DNN,需要对 DNN 中使用的算子使用高性能的张量程序。传统方式为使用算子库,算子库包含了大量的预定义算子(Operators),这些算子是构建和执行神经网络模型的基本单元。例如对于 CUDA 平台,使用 CuDNN 库,预先由工程师编写兼容某种 GPU 硬件平台的大量算子,在运行时直接调用。然而这种传统方式面临着越来越多的挑战:
优化手段的多样性:如前面的章节介绍,存在循环优化、存储优化、指令优化等多种优化方式,在编写程序时如何使用和编排这些优化是十分困难的事,不仅与硬件平台相关,也与要执行的程序相关,程序参数例如卷积核大小、特征图大小的变化也会影响优化方式的选择,再加上各种优化还涉及其优化因子如循环分块因子的选择。软硬件的组合使得编写一套高性能的算子库十分的耗费精力。
优化方式的通用性:程序优化方式的选择受到多种因素影响,很难有一个通用的方式能覆盖所有场景,普遍的方式是为每一种硬件的每一套参数都维护一个算子实现。以卷积算子为例,这是深度学习中最常用的算子之一。在不同的硬件上,卷积算子的实现可能会有很大差异。在 CPU 上,卷积算子可能会使用高度优化的库,如 Intel 的 MKL 或 OpenBLAS,这些库针对特定的 CPU 架构进行了优化,可以利用 SIMD 指令集等硬件特性来加速计算。在 GPU 上,卷积算子的实现通常会利用 CUDA 或 OpenCL 等并行计算框架。GPU 的高并行性使得卷积操作可以通过并行化来大幅加速。此外,不同的 GPU 架构(如英伟达的 Volta、Turing 等)可能需要不同的优化策略。
软硬件的快速更迭:随着新的处理器架构和专用 AI 加速器的不断涌现,硬件平台变得更加多样化。每种硬件都有其独特的特性和优化需求,算子库需要为这些不同的硬件提供定制化的算子实现,这大大增加了开发和维护的工作量。每当英伟达发布新的 CUDA 版本,引入新的 GPU 指令集时,算子库开发者必须更新 GPU 算子,以利用这些新特性来提升性能。再比如新的算子不断涌现,现在的卷积已经有几十种卷积,各种激活函数也在不断提出。每提出一个新算子,就需要在目标硬件平台实现一套算子库。
自动调优原理#
为了以一种高效的方式在各种硬件平台上提供这些算子,已经引入了多种编译器技术,用户使用高层级声明性语言以类似于数学表达式的形式定义计算,编译器根据该定义生成优化的张量程序。从高层定义中自动生成高性能张量程序是非常困难的。根据目标平台的架构,编译器需要在一个非常大和复杂的空间中进行搜索,其中包含优化的组合选择(例如,分块、向量化、并行化,不同的组合导致的程序性能差异极大)。寻找高性能的程序需要搜索策略来覆盖一个全面的空间,并有效地探索它。
这一过程称为自动调优,指在编译过程中,编译器或相关工具自动调整和优化代码的执行参数,以提高程序在特定硬件上的运行效率。这通常涉及到对算法、内存访问模式、并行度等多个方面的优化。自动调优的目的是减少人工干预,使得程序能够自动适应不同的硬件环境和运行条件。在 AI 领域,这尤为重要,因为 AI 模型的计算复杂度通常很高,而且不同的硬件平台(如 CPU、GPU、FPGA 等)对计算和内存访问的优化需求各不相同。
自动调优的过程通常包括以下几个步骤:
性能分析:通过分析程序的运行情况,识别性能瓶颈和优化机会。
参数搜索:系统地探索不同的编译选项和运行参数,寻找最佳的配置。
性能评估:对不同的配置进行测试,评估其对性能的影响。
反馈学习:根据性能评估的结果,调整搜索策略,进一步优化参数选择。
自动调优可以显著提高 AI 应用的运行效率,尤其是在深度学习等计算密集型任务中。然而,由于 AI 应用的多样性和复杂性,自动调优仍然是一个活跃的研究领域,研究人员和工程师们正在不断探索更高效、更智能的调优方法。在自动调优中,TVM 是走在前列的 AI 编译器,其自动调优系统已经历经三代,本节将介绍 TVM 的这三代自动调优系统。
AutoTVM 介绍#
AutoTVM 是 TVM 的第一代自动调优系统,其是基于模板的。
编写模板#
AutoTVM 是基于模板的 tuner,对于每一个需要调优的算子,需要使用 TVM 的 DSL 编写调优的 knob,例如循环展开的因子、循环重排序的顺序等。例如对于矩阵乘法,可以编写这样的模板:
@autotvm.template("tutorial/matmul")
def matmul(N, L, M, dtype):
A = te.placeholder((N, L), name="A", dtype=dtype)
B = te.placeholder((L, M), name="B", dtype=dtype)
k = te.reduce_axis((0, L), name="k")
C = te.compute((N, M), lambda i, j: te.sum(A[i, k] * B[k, j], axis=k), name="C")
s = te.create_schedule(C.op)
# schedule
y, x = s[C].op.axis
k = s[C].op.reduce_axis[0]
##### define space begin #####
cfg = autotvm.get_config()
cfg.define_split("tile_y", y, num_outputs=2)
cfg.define_split("tile_x", x, num_outputs=2)
##### define space end #####
# schedule according to config
yo, yi = cfg["tile_y"].apply(s, C, y)
xo, xi = cfg["tile_x"].apply(s, C, x)
s[C].reorder(yo, xo, k, yi, xi)
print('original')
print(tvm.lower(s,[A, B, C],simple_mode=True))
return s, [A, B, C]
生成的原始调度如下:
for (i.outer: int32, 0, 512) {
for (j.outer: int32, 0, 512) {
C[((i.outer*512) + j.outer)] = 0f32
for (k: int32, 0, 512) {
let cse_var_2: int32 = (i.outer*512)
let cse_var_1: int32 = (cse_var_2 + j.outer)
C[cse_var_1] = (C[cse_var_1] + (A[(cse_var_2 + k)]*B[((k*512) + j.outer)]))
}
}
}
将 i 轴和 j 轴定义为可 split 的调优轴,设置 num_outputs=2 表示单个轴会被拆分为两个轴,并且进行了循环重排序,最终循环轴会由之前的 i.outer、j.outer、k 变为 i.outer、j.outer、k、i.inner、j.inner。
例如将 i 从 512 拆分为 8 和 64,将 j 从 512 拆分为 128 和 4,生成的调度如下:
for (i.outer: int32, 0, 8) {
for (j.outer: int32, 0, 128) {
for (i.inner.init: int32, 0, 64) {
for (j.inner.init: int32, 0, 4) {
C[((((i.outer*32768) + (i.inner.init*512)) + (j.outer*4)) + j.inner.init)] = 0f32
}
}
for (k: int32, 0, 512) {
for (i.inner: int32, 0, 64) {
for (j.inner: int32, 0, 4) {
let cse_var_3: int32 = (j.outer*4)
let cse_var_2: int32 = ((i.outer*32768) + (i.inner*512))
let cse_var_1: int32 = ((cse_var_2 + cse_var_3) + j.inner)
C[cse_var_1] = (C[cse_var_1] + (A[(cse_var_2 + k)]*B[(((k*512) + cse_var_3) + j.inner)]))
}
}
}
}
}
该函数有多种拆分因子的选择方式,例如直接指定 candidate,给定一系列拆分方式;给定拆分时的偏好策略,是直接用乘法因子或是只要 2 的幂次方的乘法因子.
指定任务#
指定待调优的算子,如 resnet18 中所有的 conv2d,TVM 会根据事先编写的 conv2d 模板生成调度搜索空间。
指定调优参数#
AutoTVM 有多个 tuner,根据 index 的 random tuner 和 grid tuner、基于遗传算法的 ga tuner、基于 Xgb 的 XGBTuner。tuner 影响的是对调度搜索空间的探索,搜索空间是巨大的难以穷举的,通过 tuner 来高效搜索相对更优的调度候选项。
性能评估#
对于 XGBTuner 这个具有 cost module 的 tuner,调度候选项在硬件上测量之前会使用模型预测相对性能,选出相对优的一批再去运行,这样减少真实测量的次数,减少调优时间。
关键组件#
以上框架的关键组件有:
代码生成器:不同的调度配置会导致不同的循环结构、内存存取顺序等,生成的代码大不相同,这里使用了 TVM 的代码生成。
代价模型:调度搜索空间是巨大的,穷举一遍是不可能的。代价模型的作用是不断修正调度配置,选出相对最佳的配置,减少调优时间,或者说在固定的调优时间达到更好的性能。
硬件测量环境:AutoTVM 有 RPC tracker,可以启动多个硬件平台进行调优。
Ansor 介绍#
AutoTVM 需要事先编写模板来组成调度的搜索空间,最佳性能的上限取决于模板的设计,这对模板的编写带来了很高的要求。作为第二代调优系统,Ansor(Auto Scheduler)取消了模板机制,优化过程可以自动、无干预的进行:无需手动指定优化方式,编译器自动应用调度原语。
Ansor 自动生成一个覆盖全面的优化的大搜索空间,并为空间中的每个张量程序提供被选择的机会。首先,它自动构建一个大的搜索空间,以覆盖给定计算定义的尽可能多的张量程序。其次,在大搜索空间中高效搜索,该搜索空间可能比现有模板可以覆盖的范围大几个数量级。最后,在优化具有许多子图的整个 DNN 时,识别对端到端性能至关重要的子图并对其进行优先级排序,因为资源是有限的,应该将调优时间和算力资源分配给对性能有更大影响的子图。
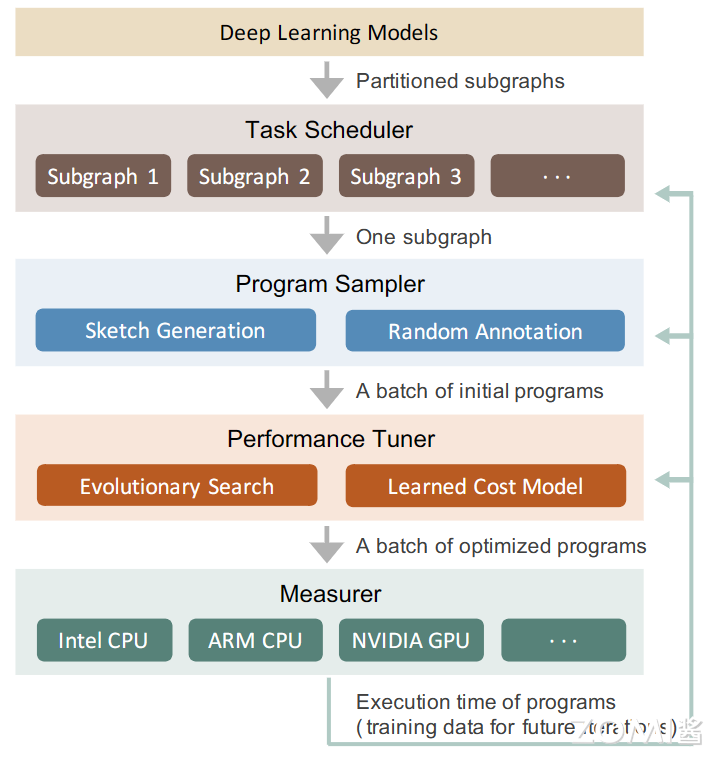
Ansor 有三个关键设计,分别是程序采样器、性能微调器、任务调度器。
程序采样器#
为了在无模板的前提下自动生成搜索空间,递归地应用一组推导规则来扩展搜索空间;为了避免在搜索空间中陷入局部最优,使用随机抽取完整的程序给每个采样点相同概率。将搜索空间定为两级,高层结构称为草图(sketch),低级结构(分块大小、并行等)称为注解(annotation)。
递归地应用一组派生规则来生成草图,例如在 CPU 上使用这样一组规则来进行草图生成:
IsStrictInlinable(S,i):表示 S 中的节点是否是个简单的逐元素算子如 relu,则可以内联
HasDataReuse:表示节点 i 是否是计算密集型,并且有丰富的算子内部数据重用机会如 matmul、conv2d
HasFusibleConsumer:表示 S 中的节点 i 是否只有一个节点 j,节点 j 可以融合到节点 i(如 matmul+bias_add,conv2d+relu
HasMoreReducetionParallel:表示节点在空间维几乎没有并行性,但是在 reduce 维有足够的并行性。(如计算一个矩阵 l2 范数,matmul 2x512 . 512x2)
对计算的定义进行静态分析,获得这些条件谓词的值。这个过程是解析计算的数学表达式的读写模式自动完成的。与 AutoTVM 中手写模板不同,手写模板同时指定了高层规则和低层规则,而草图只有高层结构。
草图只有分块结构,没有分块大小和循环标注如并行、展开和向量化,这部分由标注完成。给定一个草图列表,随机在草图上填充分块大小、对循环进行随机标注。
性能微调器#
使用进化搜索和学习成本模型来微调采样程序的性能。
进化搜索
在高质量程序的基础上进行突变。突变类型包括分块大小、并行、计算位置等。
成本模型
基于梯度增强决策树作为底层模型
任务调度器#
一个 DNN 可以被划分为许多独立的子图,对于某些子图,花费时间对他们进行调优并不能显著提升整个 DNN 的端到端的性能。为了提高调优效率,Ansor 动态的将不同的时间资源进行分配。
以优化单个 DNN 的端到端延迟为例,Ansor 对具有较高初始延迟的子图进行优先排序,因为乐观猜测可以快速减少其延迟。之后,如果 Ansor 花费了多次迭代而没有观察到其延迟的减少,那么 Ansor 就会离开子图。
Ansor 也存在诸多限制,例如不能对动态形状的图进行优化,也无法使用硬件平台特定指令支持,如 Intel VNNI、NVIDIA Tensor Core。
Meta Scheduler 介绍#
Meta Schedule 是第三代调优系统,在它之前,TVM 存在三套生成调度的 API:
手动调度:开发人员利用调度原语手动优化程序,程序性能高度依赖开发者的经验。
AutoTVM:开发者需要为每个算子设计一个调度生成的模板,从而使得调优器可以探索这个生成的调度空间。
Ansor:根据一组预定义的规则,自动生成调度模板作为设计空间。但是扩展 Ansor 到新的调度原语如张量化、流水线化等绝非易事。
上面三个系统都有独立的 API,且互不兼容。AutoTVM 要求用户学习一组新的 API,AutoScheduler 引入了另一组基于 C++ 的搜索规则。它增加了用户的心理负担和扩展现有系统的开销。
MetaSchedule 提供以下特性:
用于实现手动调优、AutoTVM 风格和 AutoScheduler 风格的统一 API。
所有调度原语的可扩展性,包括张量化和循环分块。在自动调优中使用新的原语几乎不需要额外的努力。
自动化基础设施在其每个组件上都是可扩展的。每个组件的系统可以在纯 python 或 C++或两者中轻松自定义。例如,可以开发一个新的在 python 中的调度空间生成器或者新的 ProgramRunner 等。
Meta Scheduler 遵循下图的调优流程:

设计空间生成#
底层系统记录了用户使用的所有调度原语,以及在采样指令上做出的随机决策,称为 Trace。Trace 可能包含零条或多条采样指令,这些指令引入调度中的不确定性,形成了一个可供探索的设计空间,例如哪一组分块大小在特定硬件上效果最佳。
探索设计空间#
Meta Schedule 提供了多种内置的探索策略,可以详尽或高效地进行搜索 ,来实现高效的调度。其搜索策略与之前调优器的搜索策略类似,可以随机搜索,也可以使用成本模型进行指导。
数据库#
所有度量记录都经过序列化并存储在数据库中。数据库记录的内容包括工作负载,序列化的 TensorIR;执行测量的硬件目标;参数类型:输入张量的形状和 dtype;运行时间等。
在 Meta scheduler 中,成本模型、数据库、特征提取器、程序运行器等都是可定制、易于扩展的。
小结与思考#
高性能算子面临优化手段多样、通用性差和软硬件更迭快的挑战。
自动调优通过性能分析、参数搜索、性能评估和反馈学习等步骤,自动调整和优化代码执行参数。
TVM 的三代自动调优系统分别是 AutoTVM、Ansor 和 Meta Scheduler,它们在调优方式和性能上各有特点。